The first system that was prototyped for Geronimo was the
drive system. Early on, we knew that we wanted the drive system to be simple
and powerful. We decided on large wheels and a large gear ratio (7:1) to ensure
that the drive system would be able to drive Geronimo up the incline on the
playing surface. Our initial prototype featured:
- Large gears (70 teeth), cut from acrylic on the laser cutter
- Small gears (10 teeth), cut from aluminum on the water jet cutter
- Wheels (6” diameter), cut from wood on the water jet cutter
- Barber-Coleman geared motors
- Tires cut from inner tube
- A large, 3/8” thick main axle
- Aluminum gear plates to aid in alignment
The prototyped version of the drive system can be seen below.

Geronimo with prototyped drive system.
While the prototyped drive system functioned, we found that
there were alignment problems with the wheels. In the second and final
iteration of the drive system, we added 3D printed bearings. These bearing fit
tightly into the center holes of the wheels and large gears, and loosely fit
onto the primary axle. The bearings removed the side to side play of the wheels
while still allowing them to rotate about the axle. Additionally, self-fusing tape was used as tire material in the final version of the drive system. The final version of the
drive system can be seen below.
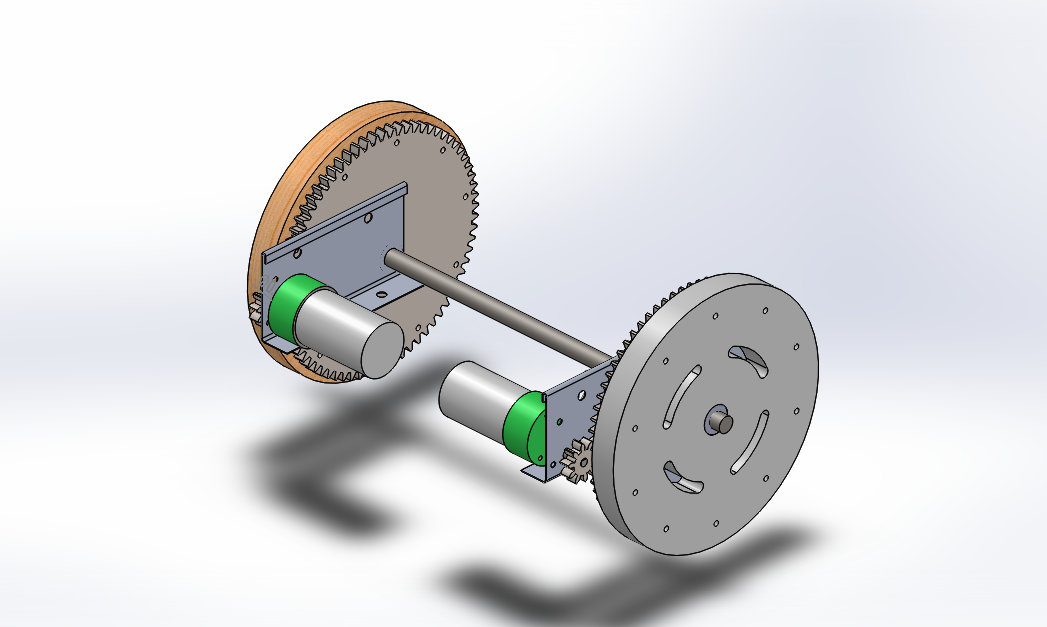
Solid model of final drive system.

Side view of final drive system.
Author: Josh Smith
No comments:
Post a Comment